The Curious Landscape of Multiclass Learning
Welcome to the second installment of the Learning Theory Alliance blog post series! In case you missed the first installment on calibration, check it out here.
This time, Nataly Brukhim and Chirag Pabbaraju tell us about some exciting breakthrough results on multiclass PAC learning.
The gold standard of learning theory is the classical PAC model defined by Valiant in 1984 [Val84]. In particular, it allows us to reason about two fundamental questions: what can be learned, and how to learn it.
Generally in this setting, we are given some domain 





For binary classification tasks, we get an especially clean and refined mathematical picture, in which these two questions are essentially resolved:
- The question of what can be learned is answered via the Vapnik-Chervonenkis (VC) dimension [VC68, BEHW89], which completely characterizes learnability. A bit more concretely, the VC dimension is a combinatorial measure that quantifies the sample complexity needed to learn any given function class
of binary classifiers.
- The question of how to learn is resolved by a rich algorithmic and analytical toolbox. This includes, for example, the elegantly simple algorithmic principle of Empirical Risk Minimization (ERM), the clever boosting methodology, and sample compression scheme guarantees (we will elaborate more on these tools later on).
One might expect similar ideas to hold for multiclass classification tasks as well. After all, it is the most natural generalization of the binary setting to allow for more than two labels. Surprisingly, this is not at all the case! The story turns out to be much more complex and enigmatic when it comes to multiclass learning.
For example, the main question of what is learnable (i.e., extending the VC characterization of learnability) had been a longstanding open problem the study of which dates back to 1980s. Seminal works [NT88, Nat89, BDCHL95] identified that the Natarajan dimension characterizes PAC learnability when the number of classes is bounded. However, it remained unknown whether it also captures learnability when the number of classes is unbounded.
Similarly, the question of how also reveals a stark contrast between binary and multiclass classification.
One important example is the standard ERM principle which in fact fails to hold in the multiclass case [DSBDSS11]. Boosting theory also does not easily extend from the binary case [BHMS21, BDMM23], and it had been unknown whether learnable classes admit finite sized sample compression schemes in the multiclass setting, as is true in the binary one.
On the whole, the clean mathematical picture of binary classification did not generalize, revealing a landscape of multiclass learning far more puzzling than initially expected. In the past couple years, several advances were achieved, resolving some of these longstanding questions. In this post, we’re going to describe these results with the goal of demystifying multiclass learning and possibly shedding light on broader phenomena in learning theory.
The Question of What is Learnable and the DS Dimension
Many important machine learning tasks require classification into many target classes: in image object recognition, the number of classes is the number of possible objects. In language models, the number of classes scales with the dictionary size. In protein folding prediction, the goal is to predict the 3D structures of proteins based on their 1D amino sequence.
The fundamental question of what is learnable can be formalized as follows. For a domain
Definition (PAC learnability): We say that 









![\Pr_{S}\left[ \Pr_{x \sim \mathcal{D}}\left[ f_S(x) \ne h^\star(x)\right] \le \epsilon \right] \ge 1-\delta.](https://s0.wp.com/latex.php?latex=%5CPr_%7BS%7D%5Cleft%5B+%5CPr_%7Bx+%5Csim+%5Cmathcal%7BD%7D%7D%5Cleft%5B+f_S%28x%29+%5Cne+h%5E%5Cstar%28x%29%5Cright%5D+%5Cle+%5Cepsilon+%5Cright%5D+%5Cge+1-%5Cdelta.&bg=ffffff&fg=000&s=2&c=20201002)
The seminal result of Vapnik and Chervonenkis(1971) asserts that the finiteness of the VC dimension characterizes the sample complexity for the binary case, i.e., 
Definition (VC dimension): We say that 



The characterization of learnability in the binary case is then given by the following tight bound on the sample complexity needed to PAC-learn any class

In the late 1980’s, Natarajan identified a natural generalization of the VC dimension. Later, [BDCHL95] showed that it exhibits the following bounds:

where 


In 2014, Daniely and Shalev-Shwartz [DSS14] studied general algorithmic principles of the multiclass setting. Their analysis led them to identify a new notion of dimension, later named the DS dimension. Initially, they proved that a finite DS dimension is a necessary condition for PAC learnability, as is true for Natarajan dimension. They then conjectured that a finite DS dimension is also a sufficient condition, but they too left the full characterization of learnability open.
The answer finally arrived in 2022, when [BCDMY22] showed that the DS dimension is indeed the correct characterization for multiclass learnability.
We will now introduce the DS dimension. Two useful concepts that we will need are the notions of a one-inclusion graph and a pseudo-cube. The idea here is to translate a learning problem
to the language of graph theory. For any 




Then, an 





Notice that when 

As a simple example, let’s say the domain 



The above graph is an example of a 
Alternatively, if another 
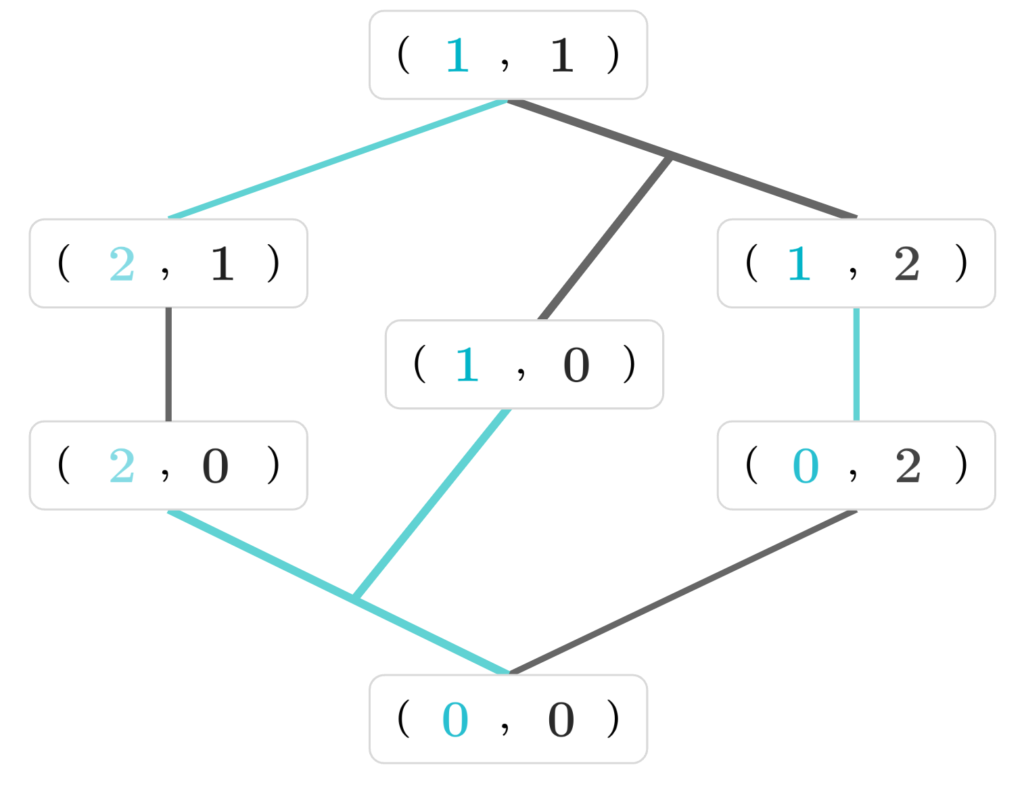
We are now ready to define the DS dimension. We say that 


Multiclass Characterization
The result showing that the DS dimension indeed characterizes learnability gives the following upper bound on the sample complexity [BCDMY22]:

where 

The proof of the upper bound above involves many components and uses a variety of classic algorithmic ideas such as boosting, sample compression, transductive learning, ERM, and shifting. In addition to these classic tools, the proof also relies on resolving a new intermediate learning problem, which is interesting in its own right: namely, a setting where instead of predicting a single label for a given input, the goal is to provide a short list of predictions. The setting is called “list PAC learning”.
Intuitively, list-learning extends the standard PAC model by allowing the learning algorithm more freedom, and is a useful relaxation of the problem. One can also easily imagine scenarios where list-learning is itself a practical goal. For example, it can offer physicians a list of likely diagnoses, it can provide businesses the list of consumers’ preferences, and so on. This new setting has been since studied in several subsequent works [CP23, MSTY23]. Next, we’ll see how list-learning is a key step towards proving our desired bound.
The starting point of the proof is a combinatorial abstraction of the learning problem by translating it into the language of hypergraph theory. This results in algorithmic problems on the objects referred to as “one-inclusion graphs”, that we defined earlier. The one-inclusion graph leads to a simple but useful toy model for transduction in machine learning.
The toy model is as follows. Imagine a learning game played over a one-inclusion graph 



Now, notice that learning algorithms in this toy model are in fact orientations of the graph. Let’s see a simple example. Consider the following one-inclusion graph, similar to the ones we saw above (but is not a pseudo-cube):
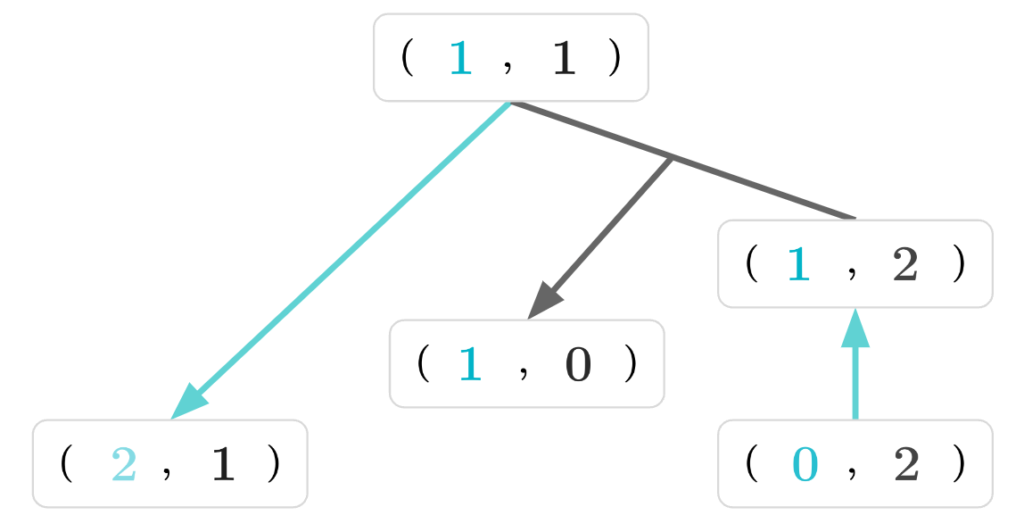
Observe that we simply oriented the edges of the graph, by choosing a single “representative” for each edge, to which it points to. An orientation is equivalent to a learning algorithm in the toy model, since it tells us which node to predict. Let’s assume that we chose 
Intuitively, the more edges that are oriented outwards of a node – the more mistakes the learner will make if that node were the chosen
But how does that toy model relate to our original problem? We can think of an input edge as revealing the values of all coordinates, or data points, labeled by the “ground truth” node
So, we now want to solve the simpler problem of finding a good orientation for the one-inclusion graph 

Translating this orientation back to our original problem, we get a (very) weak learner which has error of 

It may be tempting to try to improve the error by boosting. But standard boosting turns out to be useless in our context, since the error is so high.
It is at this point that list learning comes to the rescue. We can show that the very-weak learner actually yields a list-learner where the list is of size 



To conclude the proof, it is natural to try to reduce the learning task to one in which the number of labels is bounded. But, did we just reduce the infinite alphabet case to the finite case? The short answer is no, since the class restricted to our learned list may not contain the target function and may even be vacuously empty. The solution instead is based on learning algorithms that operate on the one-inclusion graph, and have a “local” property which is able to avoid the problem we raised.
The full algorithm is best thought of as a sample compression scheme, which demonstrates that a small subsample of the training data suffices to determine a hypothesis that correctly classifies all examples in it. We elaborate more on sample compression scheme later in this blog post.
Thus, we conclude the high-level outline of the proof for the upper bound on sample complexity via the DS dimension. While this proof is intricate, containing many details and components that are beyond the scope of this post, we hope that this overview captures the main ideas and sparks your interest in exploring the paper further.
DS Dimension vs. Natarajan Dimension
So we saw that the DS dimension characterizes multiclass learnability. But what about the Natarajan dimension, which had been the leading candidate to be the correct answer since the 1990’s?
Could it be essentially equivalent to the DS dimension? Perhaps it scales with the DS dimension up to certain factors?
The answer is no! The work by [BCDMY22] shows an arbitrarily large gap between the DS and the Natarajan dimension, proving that the Natarajan dimension in fact does not characterize learnability in the general case.
To understand this result, we first define the Natarajan dimension. We say that ![i \in [n]](https://s0.wp.com/latex.php?latex=i+%5Cin+%5Bn%5D&bg=ffffff&fg=000&s=2&c=20201002)




Let’s look at a simple example of a domain

It may help to notice that the 2-Natarajan cube is equivalent to containing a square as a sub-graph of the corresponding one-inclusion graph. This intuition will help explain the separation result for higher dimensions. Let’s start with the simplest case we can show between the Natarajan and DS dimensions:
Here, as we said earlier, the DS dimension is 2. But the Natarajan dimension is only 1. Intuitively this can be seen by the fact that there is no sub-graph that is a square.
And what about a larger separation? How large can this gap be?
Before we continue, we introduce a connection between learning and topology. It turns out that there is an interesting equivalence between hypothesis classes 
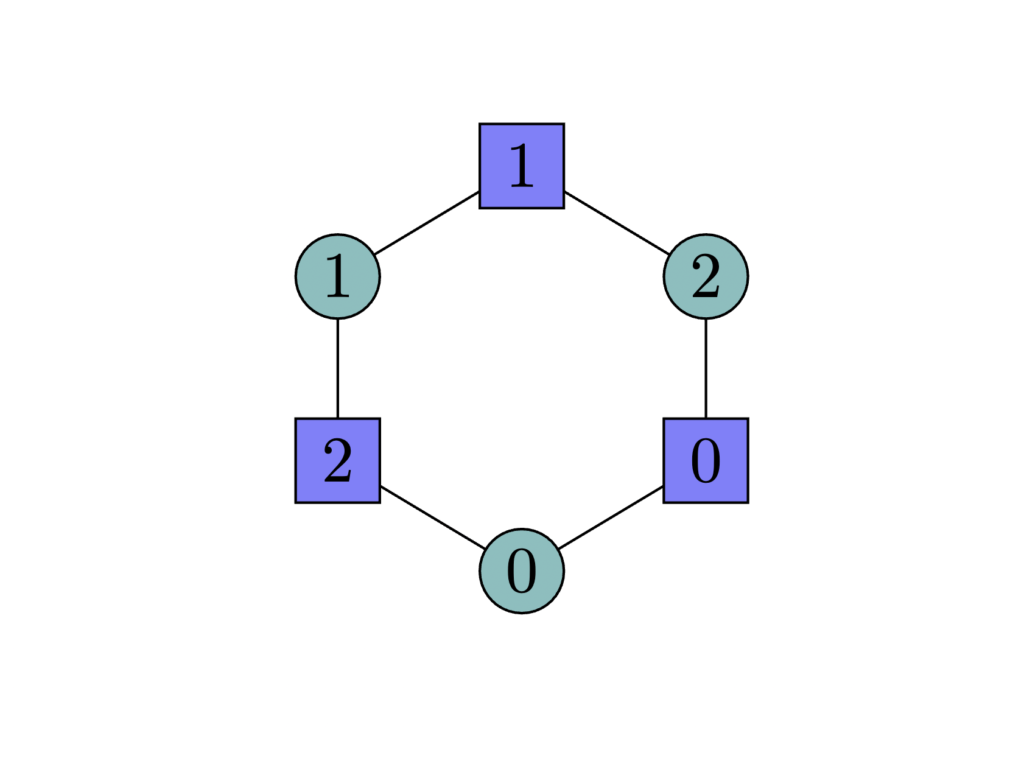
In 2 dimensions, a simplicial complex is simply a graph. Here, each node correspond to a certain label, at a certain position. The circle node appears as the first symbol, and the square appears as the second symbol. There is an edge between two nodes if they correspond to a “word”, a hypothesis in
Importantly, it can be shown that a 2-Natarajan cube also corresponds to an embedded square in a simplicial complex. So, we can see that the above simplicial complex does not have a square as a sub-graph and therefore, we get that 1 vs. 2 separation as we said. That is, the DS dimension is 2 but the Natarajan dimension is only 1.
Now let’s try to get a separation of 1 vs. 3.
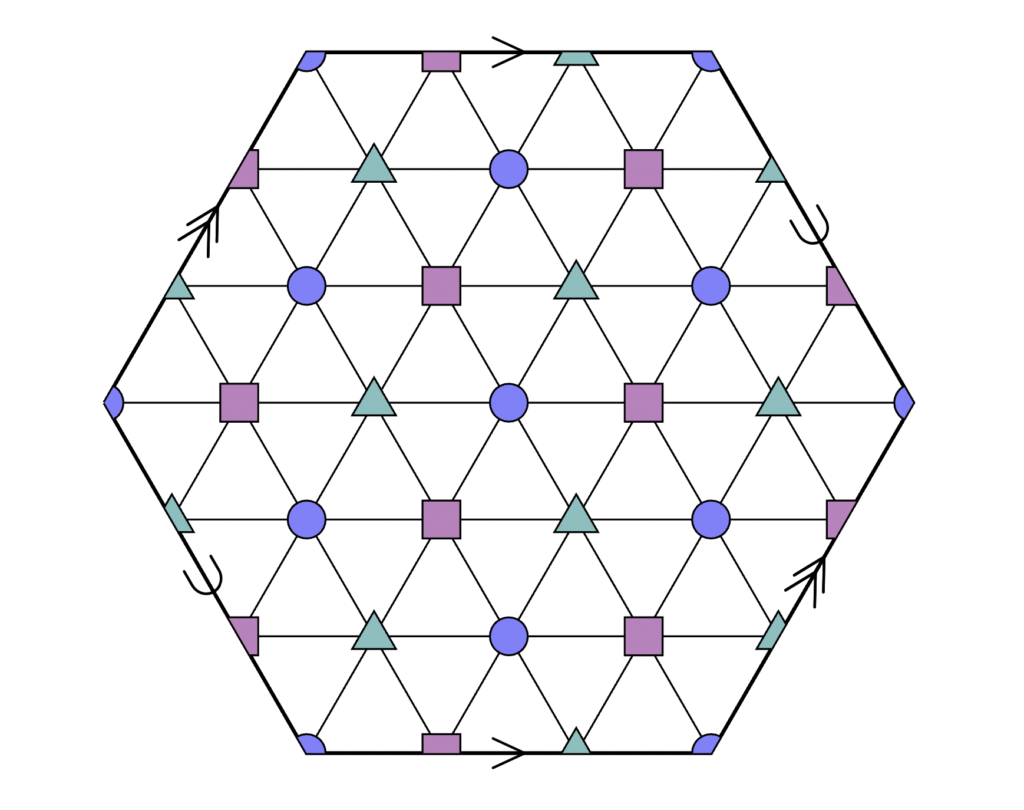
This is an example of a 3-dimensional pseudo-cube with Natarajan dimension 1. The “elements” in this larger pseudo-cube are the triangles (there are 54 of them). Each such triangle corresponds to a “word”, a hypothesis in 
Notice that in this example, the complexity here increased pretty quickly – we only needed 6 elements to prove a gap of 1-to-2, and for 1-to-3 we already need 54. What about 1-to-4? This is much more difficult. A computer search found such a gap 1-to-4, corresponding to a class of size 118098! Should we give up on a systematic way to find a larger gap?
Let’s go back to the connection we mentioned between learning and topology. Interestingly, this equivalence turned out to be a lot richer than it initially seemed to be. In particular, notions similar to our dimensions have also been studied in algebraic topology. A Natarajan dimension of 1 corresponds to a local combinatorial criteria for hyperbolicity. A DS dimension of 
Building on this unique and beautiful connection, and using a deep and involved result in algebraic topology by Januszkiewicz and Świątkowski, 2003, it was proved in [BCDMY22] that the gap can be unbounded! That is, there exists a class with infinite DS dimension, but a Natarajan dimension of 1.
The Question of How to Learn
The VC/DS dimensions characterize what classes can be PAC learned. But how does one learn these classes? In the binary classification setting, a variety of tools including Empirical Risk Minimization (ERM), boosting, as well as sample compression schemes, each yield successful learning algorithms. As it turns out, each of these tools end up having some deficiencies in terms of how they extend to the multiclass setting.
Empirical Risk Minimization and Uniform Convergence
Finite VC dimension in the binary classification setting, which is a necessary condition for PAC learning, also endows a hypothesis class with a very special property — that of uniform convergence. Uniform convergence guarantees that the empirical loss of every hypothesis in the class on a sufficiently large (but finite) sample is close to its population loss with respect to the entire distribution. Because of this, the ERM algorithm, which simply outputs any hypothesis in the class that minimizes the error on the training dataset, is a valid learning algorithm.
In the setting of multiclass learning, if the Natarajan dimension of the class as well as the number of labels is finite, then the class still satisfies uniform convergence. However, the situation drastically changes when we allow an unbounded number of labels. In this case, it is possible to construct learnable hypothesis classes, which do not satisfy uniform convergence, meaning that for these classes, two different hypotheses from the class that each minimize the empirical risk could differ by an arbitrarily large factor in their population risk [DSBDSS11]! Thus, we can no longer always rely on the ERM principle for learning in the multiclass setting.
Boosting
Another common approach to obtain a PAC learner is via boosting. Namely, in the binary setting, having a weak learner that simply has error bounded away from 



Sample Compression
Finally, another standard way to obtain a learner is via sample compression. Roughly speaking, a hypothesis class admits a sample compression scheme, if for every sample labeled by a hypothesis from the class, it is possible to retain only a small subsample, using which the labels on the entire sample can be inferred. As a standard example, consider the binary hypothesis class of axis-aligned rectangles in two dimensions. Suppose we are given a training dataset labeled by some unknown rectangle, as in the figure below.
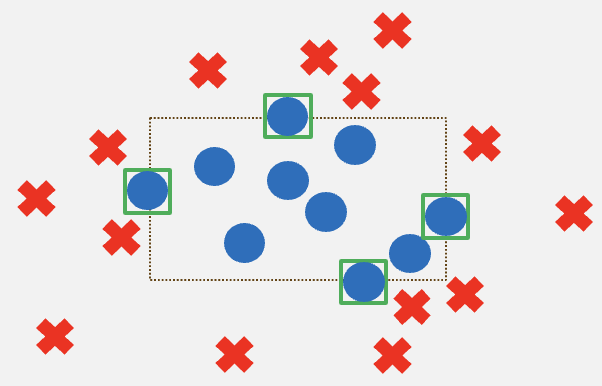
Observe how we can get rid of all samples except the left-most, right-most, top-most and the bottom-most circle, and simply draw a rectangle with these four points determining the boundary — this correctly classifies all the points, including the ones we threw away.
More concretely, a sample compression 
- A compressor
- A reconstructor




For any sequence 
- If
, then all elements in
should also belong to
for all
.
The first condition requires that the output of the compressor only has elements from the original sample itself, and not outside of it. The second condition requires that the output of the reconstructor correctly labels all of the training sample, including the points that were kept from it. Finally, the size of the compression 
It turns out that sample compression schemes are intrinsically tied to learnability. Namely, it can be shown [LW86] that the output of the reconstructor in a compression scheme of size 

Binary PAC Learnability  Compression
Compression
Perhaps curiously, notice that the size of the compression in the example of two-dimensional rectangles, i.e., 4, also happens to be the VC dimension of the class. It is a longstanding conjecture [War03] that every binary hypothesis class having VC dimension 
For binary hypothesis classes, the answer turns out to be yes! For every binary class of VC dimension 


Multiclass PAC Learnability  Compression
Compression
Recall how we saw that ERM and boosting don’t extend in a straightforward way to give a learner in the multiclass setting. The way that [BCDMY22] obtain a learner for multiclass classes of DS dimension 
The compression scheme of [MY16] crucially relies on the existence of proper PAC learners for binary classes — these are learners that output a hypothesis from within the class being learned. For example, ERM is an instance of a proper PAC learner. We saw above that ERM is not always a PAC learner for multiclass classes. In fact, an even stronger result holds true in the multiclass setting: there exist learnable classes that provably cannot be learned by any proper PAC learner, let alone ERM [DSS14]. Another important component in the compression scheme of [MY16] is an upper bound on the dual VC dimension in terms of the VC dimension. As it turns out, one can easily exploit the combinatorial definition of the DS dimension to construct simple classes that have DS dimension 1 but unbounded dual DS dimension. Thus, even if we were able to obtain a bound in terms of the dual DS dimension, such a bound would be vacuous.
But never mind these obstacles — maybe an entirely different compression scheme from that of [MY16] still works for the multiclass case? As it turns out, the answer is no! [Pab24] shows that it is simply not possible to have a sample compression scheme that is only a finite function of the DS dimension, and is independent of
Concretely, they construct a multiclass hypothesis class that has DS dimension 1, such that any sample compression scheme that compresses samples of size 
The construction of the multiclass class that witnesses the above sample compression lower bound is inspired from a result that shows the same lower bound for partial hypothesis classes [AHHM22]. Partial hypothesis classes consist of hypotheses that map the domain 

Conclusion
In summary, we have seen how there are stark differences in the landscape of learnability as we transition from the binary to the multiclass setting. We saw how ERM, boosting and sample compression — popular tools to obtain learning algorithms in the binary classification setting — behave in a markedly different way in the multiclass setting. We also saw that learnability in the multiclass setting is characterized by the DS dimension, a quantity that reduces to the VC dimension in the binary setting, but is combinatorially much richer in the multiclass setting.
Footnotes
- The projection
of
to
. ↩︎
References
- [AHHM22] Noga Alon, Steve Hanneke, Ron Holzman, and Shay Moran. A theory of PAC learnability
of partial concept classes, 2022. - [BCDMY22] Nataly Brukhim, Daniel Carmon, Irit Dinur, Shay Moran, and Amir Yehudayoff. A
characterization of multiclass learnability, 2022. - [BDCHL95] Shai Ben-David, Nicolo Cesabianchi, David Haussler, and Philip M Long. Characteri-
zations of learnability for classes of {0,…,n}-valued functions, 1995. - [BDMM23] Nataly Brukhim, Amit Daniely, Yishay Mansour, and Shay Moran. Multiclass boosting:
Simple and intuitive weak learning criteria, 2023. - [BEHW89] Anselm Blumer, Andrzej Ehrenfeucht, David Haussler, and Manfred K. Warmuth.
Learnability and the Vapnik-Chervonenkis dimension, 1989. - [BHM23] Nataly Brukhim, Steve Hanneke, and Shay Moran. Improper multiclass boosting, 2023.
- [BHMS21] Nataly Brukhim, Elad Hazan, Shay Moran, and Robert E. Schapire. Multiclass boosting
and the cost of weak learning, 2021. - [CP23] Moses Charikar and Chirag Pabbaraju. A characterization of list learnability, 2023.
- [DSBDSS11] Amit Daniely, Sivan Sabato, Shai Ben-David, and Shai Shalev-Shwartz. Multiclass
learnability and the erm principle, 2011. - [DSS14] Amit Daniely and Shai Shalev-Shwartz. Optimal learners for multiclass problems, 2014.
- [Fre95] Yoav Freund. Boosting a weak learning algorithm by majority, 1995.
- [Han15] Steve Hanneke. The optimal sample complexity of PAC learning, 2015.
- [LW86] Nick Littlestone and Manfred Warmuth. Relating data compression and learnability, 1986.
- [MSTY23] Shay Moran, Ohad Sharon, Iska Tsubari, and Sivan Yosebashvili. List online classifica-
tion, 2023. - [MY16] Shay Moran and Amir Yehudayoff. Sample compression schemes for VC classes, 2016.
- [Nat89] Balas K. Natarajan. On learning sets and functions, 1989.
- [NT88] Balas K. Natarajan and Prasad Tadepalli. Two new frameworks for learning, 1988.
- [Pab24] Chirag Pabbaraju. Multiclass learnability does not imply sample compression, 2024.
- [SF12] Robert E Schapire and Yoav Freund. Boosting: Foundations and algorithms, 2012.
- [Vap95] Vladimir Vapnik. The nature of statistical learning theory, 1995.
- [VC68] Vladimir Vapnik and Alexey Chervonenkis. On the uniform convergence of relative
frequencies of events to their probabilities, 1968. - [War03] Manfred K Warmuth. Compressing to VC dimension many points, 2003.